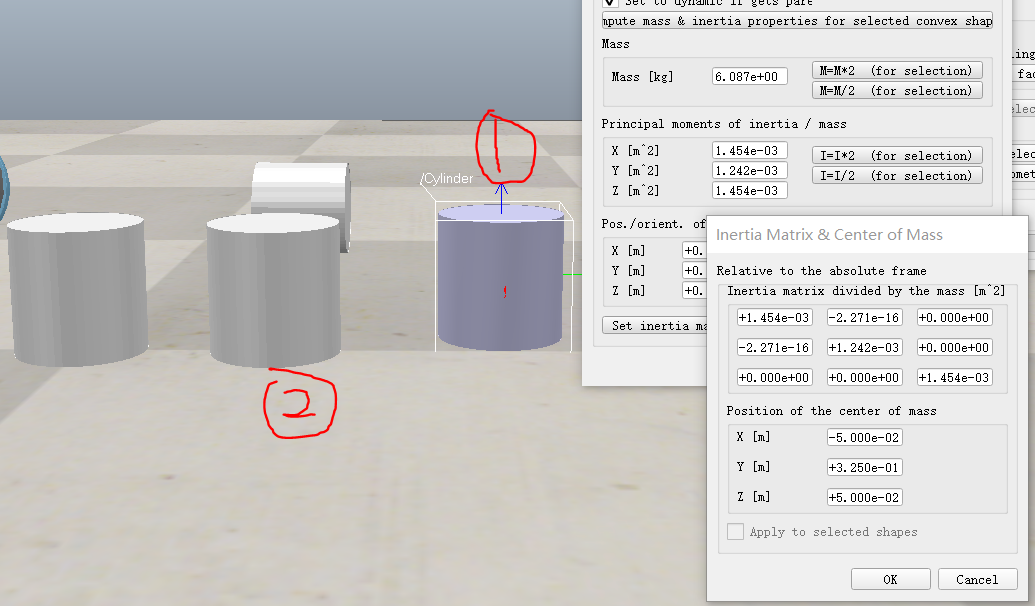
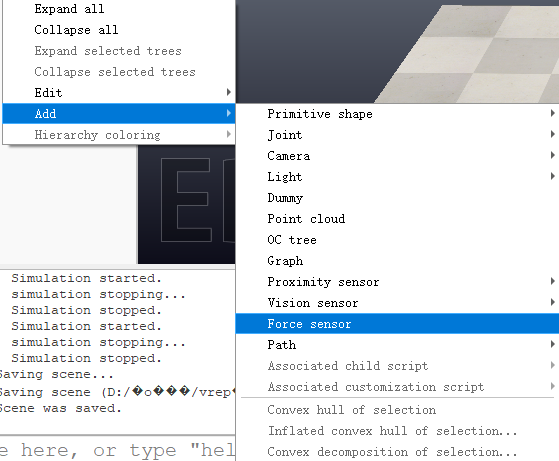
目的:用v-rep来测量动力学方程中的参数——惯量矩阵: 1、基础知识及说明:https://www.cnblogs.com/21207-iHome/p/7765508.html 2、我也用solidwors和vrep进行了验证,如图: 1号是vrep中画的圆柱,2号是导入stl文件生成的圆柱 1号的惯量矩阵 2号的惯量矩阵 下面是soliworks测量的惯量矩阵 可以看出,虽有误差,但可以接受,应该是软件之间的误差。 3、补充说明 (1)问题:上面链接中说,v-rep的转动惯量可自己设置,我改变了x轴的转动惯量,…
一、基本操作 熟悉界面、对话框,了解vrep的操作逻辑,见: https://space.bilibili.com/296553026/channel/collectiondetail?sid=311384 我对其评价非常之高,学任何软件之前就是要花时间读懂起界面,搞懂这个软件的操作逻辑,这样能够保证之后再进行任何操作上和技术性上的学习时不会产生不适应的感觉。 这个系列的视频就是在做这件事,2倍速或者1.5倍速看完,跟着做一做之后就不会对v-rep有任何的疏离感了,比看操作手册效率的多。 二、我的需求:如何链接两个…

PARL集成了tensorboardX作为可视化的工具。 1、例子: from parl.utils import summary x = range(100) for i in x: summary.add_scalar('y_2x', i * 2, i) 2、在anoconda的terminol中输入pycharm提示的相对路径 …
IMG_2373(20220510-105914).JPG IMG_2374(20220510-105914).JPG IMG_2375(20220510-105915).JPG IMG_2376(20220510-105915).JPG IMG_2378(20220510-105915).JPG IMG_2377(20220510-105915).JPG IMG_2379(20220510-105915).JPG IMG_2380(20220510-105915).JPG IMG_2381(20220510-10…