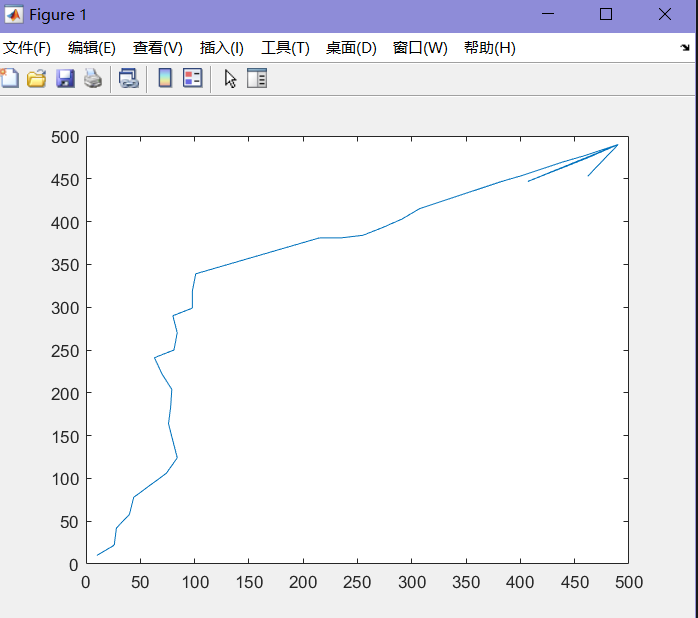
紧接着”课题顿悟”(1),对于RRT进行路径规划,RRT的本质是基于采样的路径规划算法,规划出来的几何路径,不具备物理属性; 之前困在了怎样给这条路径赋予速度、加速度等物理属性,在诸多因素的影响下,我突然明白了:RRT是基于采样的规划,路径就是采样点的连线,提取了采样点就是提取了路径,如何赋予物理意义之后就是曲线优化的内容了,现在曲线已经有了。 总结: 1、之所以想法来的这么晚,最重要的原因还是学RRT时并没有自己根据原理手撸代码,导致理解不深; 2、我的思维太注重于“可视化”了!!对于路径的认识被几何图形吸引了,…
学习原因:在家效率实在太低,也不想调程序,就把这门专业课学一学吧虽然不是搞这个的,就当增加自己的专业知识底蕴了 学习目标:学完能够基本了解kalman滤波,知道其原理、作用、实际应用;在日后有用到的时候能够快速反应过来,再回过头来深入理解。 课程地址:https://www.bilibili.com/video/BV11K411J7gp 笔记: 方程推导从最小二乘出发: IMG_2736(20230107-163842).JPG IMG_2737(20230107-163843).JPG IMG_2738(2023…
起因在于同学寻求帮助,顺便自己也学一下。 仅仅是一个matlab最小二乘法函数的应用 代码打包: 三维数据最小二乘法拟合.zip 参考文献:[1]帮助文档 [2]https://blog.csdn.net/weixin_42943114/article/details/116803379 &nbs…
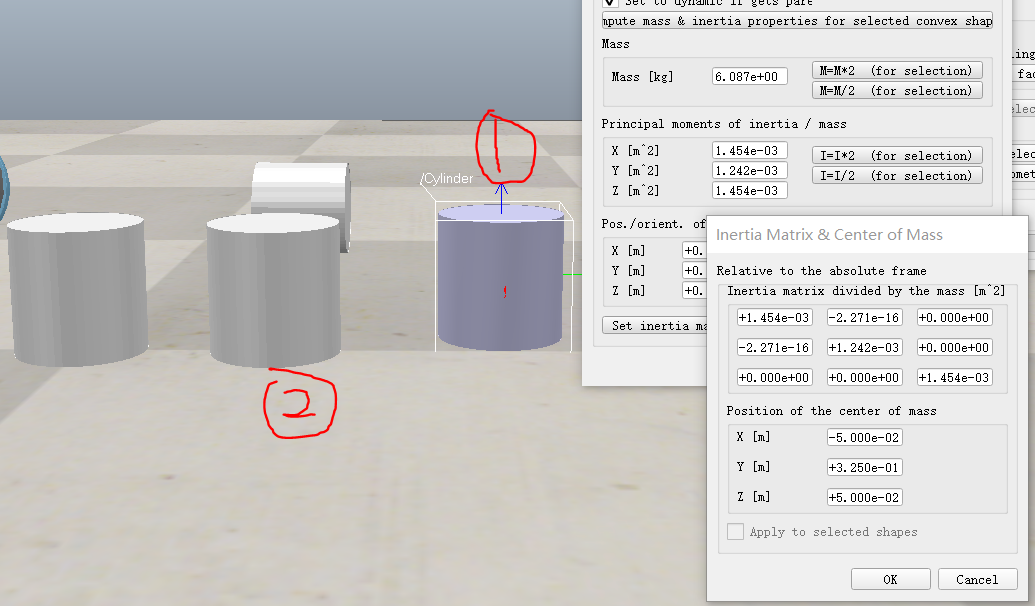
目的:用v-rep来测量动力学方程中的参数——惯量矩阵: 1、基础知识及说明:https://www.cnblogs.com/21207-iHome/p/7765508.html 2、我也用solidwors和vrep进行了验证,如图: 1号是vrep中画的圆柱,2号是导入stl文件生成的圆柱 1号的惯量矩阵 2号的惯量矩阵 下面是soliworks测量的惯量矩阵 可以看出,虽有误差,但可以接受,应该是软件之间的误差。 3、补充说明 (1)问题:上面链接中说,v-rep的转动惯量可自己设置,我改变了x轴的转动惯量,…
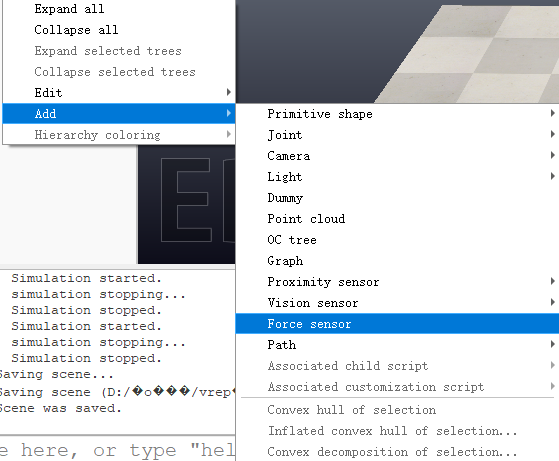
一、基本操作 熟悉界面、对话框,了解vrep的操作逻辑,见: https://space.bilibili.com/296553026/channel/collectiondetail?sid=311384 我对其评价非常之高,学任何软件之前就是要花时间读懂起界面,搞懂这个软件的操作逻辑,这样能够保证之后再进行任何操作上和技术性上的学习时不会产生不适应的感觉。 这个系列的视频就是在做这件事,2倍速或者1.5倍速看完,跟着做一做之后就不会对v-rep有任何的疏离感了,比看操作手册效率的多。 二、我的需求:如何链接两个…

PARL集成了tensorboardX作为可视化的工具。 1、例子: from parl.utils import summary x = range(100) for i in x: summary.add_scalar('y_2x', i * 2, i) 2、在anoconda的terminol中输入pycharm提示的相对路径 …
IMG_2373(20220510-105914).JPG IMG_2374(20220510-105914).JPG IMG_2375(20220510-105915).JPG IMG_2376(20220510-105915).JPG IMG_2378(20220510-105915).JPG IMG_2377(20220510-105915).JPG IMG_2379(20220510-105915).JPG IMG_2380(20220510-105915).JPG IMG_2381(20220510-10…
1、python版本: lesson3.zip 2、使用matlab reinforcement app熟悉DQN算法 然后加载环境、agent 设置参数,并训练,学过理论就会知道都什么意思 训练完了,用SIMULATE分析 具体可见matlab帮助文档 3、写matlab脚本用DQN算法实现:从图像到倒立摆的控制;结果分析写在脚本里了 network_practise.zip
还是paddle框架下的 代码: homework.zip 我真是服了自己的代码能力,老师给的代码这么基础,注释也很清晰,我改个environment居然改了一上午,还是用的排除法,最后才把gridworld.py中的三种enviroment弄清楚。 对我来说理论理解真不是事儿,要被自己的代码能力拖累死了,一点成就感没有。
IMG_2317(20220426-172930).JPG IMG_2316(20220426-172930).JPG IMG_2318(20220426-172930).JPG IMG_2319(20220426-172930).JPG IMG_2320(20220426-172930).JPG IMG_2321(20220426-172930).JPG IMG_2322(20220426-172930).JPG